Circuit Intégré L293D

Survolez l'image pour l'agrandir
3.000 TND
Tunisian Dinar (TND)
Dans son principe de base, le pont H est un assemblage de 4 transistors (2 PNP et 2 NPN) monté de telle façon que le courant puisse passer soit dans un sens, soit dans l’autre au travers de la charge (un moteur continu par exemple).
En inversant le sens du courant dans le moteur, ce dernier changera de sens de rotation.
Le plus populaire est le L293D, Pont-H de puissance moyenne (600mA) pouvant être utilisé à partir d’un Arduino.
Exemple d’utilisation pour piloter 2 moteurs à courant continu :
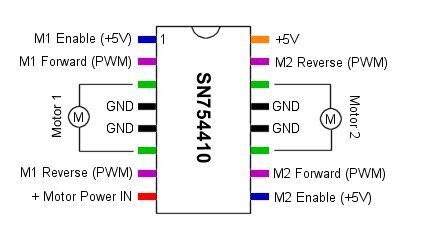
| Pin | Name | Fonction | Notes |
| 1 | 1,2 EN | Activation Moteur 1 | En mettant cette pin au 0V (LOW ou GND), cela coupera l’alimentation du moteur et en la mettant au 5V (HIGH), cela activera l’alimentation du moteur. |
| 2 | 1A | Moteur 1 Forward | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans une direction.
La vitesse peut être contrôllé à l’aide d’une PWM. |
| 3 | 1Y | Moteur 1 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 4 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 5 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 6 | 2Y | Moteur 1 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 7 | 2A | Moteur 1 Reverse | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans direction inverse.La vitesse peut être contrôllé à l’aide d’une PWM. |
| 8 | VCC2 | Moteur Power Source | Cette pin permet d’alimenter vos moteur (max 36V) |
| 9 | 3,4 EN | Moteur 2 Enable | En mettant cette pin au 0V (LOW ou GND), cela coupera l’alimentation du moteur et en la mettant au 5V (HIGH), cela activera l’alimentation du moteur. |
| 10 | 3A | Moteur 2 Forward | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans une direction.
La vitesse peut être contrôllé à l’aide d’une PWM. |
| 11 | 3Y | Moteur 2 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 12 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 13 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 14 | 4Y | Moteur 2 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 15 | 4A | Moteur 2 Reverse | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans direction inverse.
La vitesse peut être contrôllé à l’aide d’une PWM. |
| 16 | VCC1 | Logic Power | Alimentation du circuit (+5V) |




